文章目录
- 一、如何获取地理信息?
- 二、如何判定某地区新冠疫情的风险等级?
系统的人脸签到模块包含的功能非常丰富,不仅仅只有人脸识别的签到功能,而且还可以根据用户签到时候的地理定位,计算出该地区是 新冠疫情 的 高风险 还是 低风险 地区。如果员工
是在疫情高风险地区签到的,系统会立即向公司人事部门发送告警邮件。
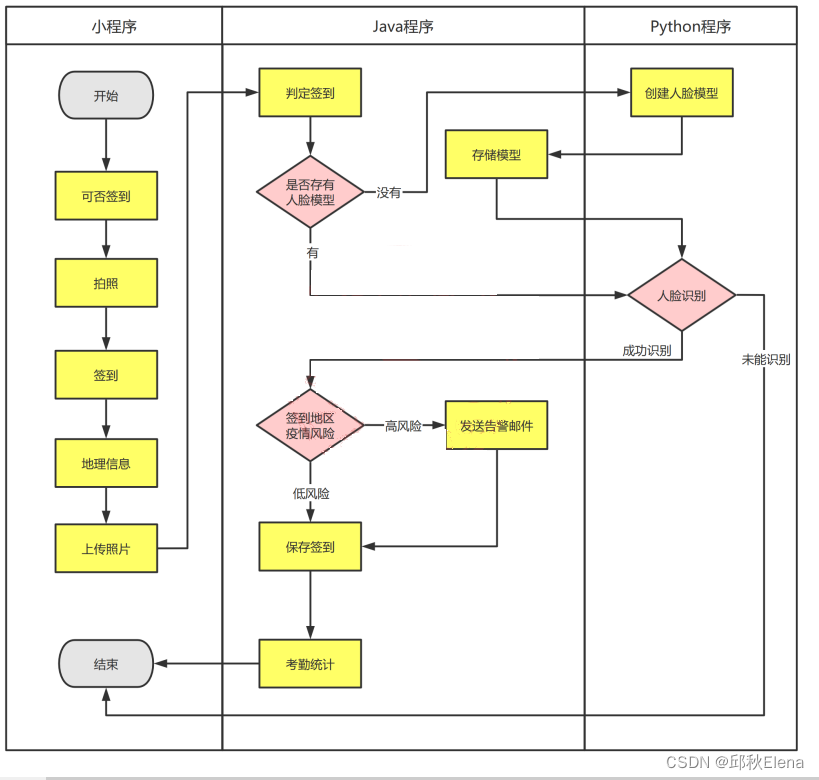
一、如何获取地理信息?
微信小程序提供了获取地理定位的接口方法,我们调用该方法就能获取到地理坐标。但是我们得
到的仅仅是坐标而已,我们还需要把地理坐标转换成地址信息,例如什么省份、什么城市、什么
街道等等
腾讯位置服务提供了把地理坐标转换成地址这个功能,只需要我们注册之后就可以免费使用了。
并且还提供了JS调用接口,我们在小程序中可以很简单的把地理坐标转换成地址信息。
二、如何判定某地区新冠疫情的风险等级?
本地宝这个网站提供了新冠疫情地区风险等级的查询,我们输入自己的地址,就能看到具体的风
险等级。
既然我们已经把地理坐标转换成了地址信息,那么就可以根据地址信息去查询风险等级了。但是
本地宝并没有提供Web接口让我们调用,所以我们只能URL地址传参的方式获取本地宝返回的响
应。而且响应的内容是HTML,我们还要从HTML中解析出我们想要的风险等级信息